this is designed for the about link on the homepage to auto expand
Rotational Kinematics
Introduction
This unit might feel familiar, and that's because it will be! We are essentially taking in all the concepts we've covered previously and turning them into their angular (rotational) analogues. We've mostly dealt with linear motion before, but this unit is dedicated to things that rotate.
First, there's one important term that needs to be defined. The idea of a rigid body is one that rotates evenly. While a rigid body that rotates is moving with a different speed at each point on the object, the shape of the object needs to be preserved for it to be a rigid body. This rotation unit only deals with rigid bodies, and the results we'll find don't really apply to non-rigid bodies.
Definitions
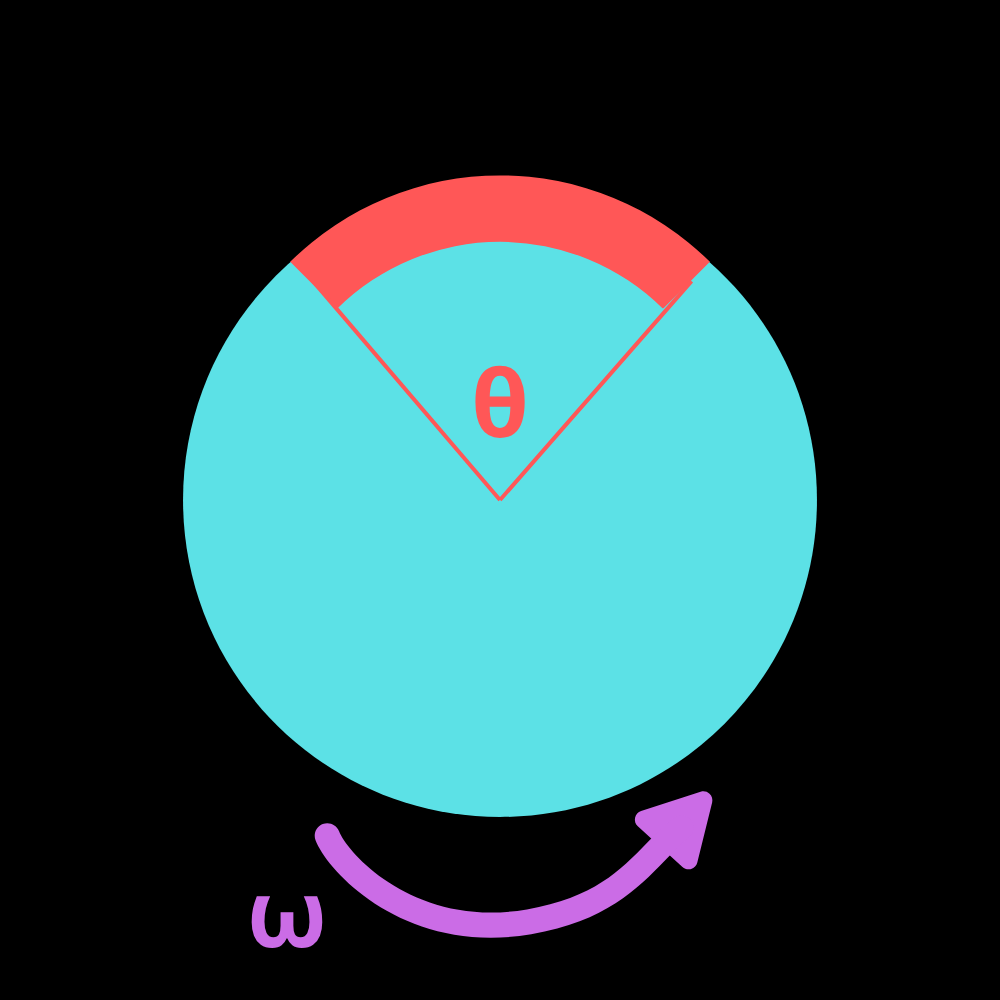
With that said, we can jump into rotational kinematics. This is just like regular kinematics, but for rotating objects. At the beginning of this course, we talked about position, velocity, and acceleration. Now, we have angular counterparts to those, being angular position $\theta$, angular velocity $\omega$ (lowercase omega), and angular acceleration $\alpha$ (lowercase alpha). A lot of quantities in this unit will use Greek letters.
Figure 1: A representation of angular position and angular velocity. Angular position is basically the angle we're used to, but it doesn't reset after a full revolution! You just keep counting. Angular velocity describes how fast something is spinning, and angular acceleration describes how angular velocity changes. They are all vector quantities. You might be wondering how directions for these are defined for a circle, which is curved. Well, my answer is clockwise versus counterclockwise for now, but there are actually concrete, linear directions for all of these quantities. But more on that later. At this level, it's good enough to know that the directions of the quantities are either clockwise or counterclockwise. In any case, we usually treat any counterclockwise rotation as "positive" and counterclockwise as "negative".
The definitions of these rotational kinematics quantities are virtually identical to those of regular kinematics. I'll put them here for you to see:
$$ \omega = \dfrac{\Delta \theta}{t} $$ $$ \alpha = \dfrac{\Delta \omega}{t} $$ Of course, we can't forget about the calculus definitions here! They're just as you would probably expect.
$$ \omega =\dfrac{d\theta}{dt} $$ $$ \alpha = \dfrac{d\omega}{dt} = \dfrac{d^2\theta}{dt^2}$$ Quick side note here. Now that we've defined the basic angular quantities, we can actually mathematically define how a rigid body works. A rigid body must have the same angular velocity for all points on the body. This makes sense if you think about it, as every point on the object has to rotate the same way in order for it to maintain its shape. Keep this fact in mind. Now, back to our regularly scheduled lesson.
Do you see how similar this is to regular kinematics? It'll be no surprise, then, that the essential equations behind rotational kinematics are analogous in form to the kinematics equations we've learned previously! Here they are in their not-so-new forms for angular quantities:
$$\underline{\textrm{\#1:}~~\omega_f=\omega_0+\alpha t}$$ $$\underline{\textrm{\#2:}~~\theta=\omega_0t+\frac12 \alpha t^2}$$ $$\underline{\textrm{\#3:}~~{\omega_f}^2-{\omega_0}^2 = 2\alpha \theta} $$ $$\underline{\textrm{\#4:}~~ \theta = \dfrac{\omega_0+\omega_f}{2} \cdot t} $$ $$\underline{\textrm{\#5:}~~\theta=\omega_f t-\frac12 \alpha t^2}$$ These equations are all you need! As long as you recognize what's being asked of you, this is really just kinematics all over again. I promise you, there are no tricks here. It's really as simple as that, but this unit is required just like kinematics so we can talk about more complex things later.
With that, let's work through a few problems on the next page. Just apply these formulas, and you'll be fine!
I should mention something here. When dealing with angular quantities, the standard SI unit for angular position is the radian. Angular velocity and angular acceleration are just like velocity and acceleration, having the units of $\textrm{rad/s}$ and $\textrm{rad/s}^2$. We never use degrees, but sometimes we use revolutions. Keep in mind that one revolution is $2\pi$ radians.
How long does it take for a CD on a player that can provide a maximum angular acceleration of $1.5 ~\textrm{rad/s}$ to spin 14 full revolutions if it starts from rest?
This is a relatively simple problem, involving just one of the rotational kinematics equations. We have angular acceleration and angular displacement and need to find time, so it makes sense to use this equation:
$$\underline{\textrm{\#2:}~~\theta=\omega_0t+\frac12 \alpha t^2}$$ Since we start at rest, $\omega_0 = 0$. This lets us write:
$$ \theta = \dfrac12 \alpha t^2 $$ Now, we just need to isolate $t$ and plug in the appropriate values. Notice how we're given the angular displacement as a number of revolutions, not radians. Since one revolution is $2\pi$ radians, the angular displacement is just $28\pi$ radians.
Now, angular quantities are no good if they can't be connected to anything else. However, they actually can! There is a way to connect angular and linear quantities that revolves around the geometry of a circle and the definition of a radian. The simplest is arc length.
Recall that a radian is defined such that the arc length $s$ of a circle with radius $r$ described by an angle $\theta$ in radians is equal to:
$$ s = r \theta $$ If we follow this logic, we can also find the velocity of points on the circle at a certain radius from the center of rotation, as well as the tangential acceleration of those points. This only has meaning if those points actually exist/lie on the object, though.
$$ v = \omega r $$ $$ a = \alpha r $$ These formulas do not apply both ways! You don't necessarily have angular velocity or acceleration if there is linear velocity or linear acceleration. They only apply for a rigid body that is undergoing rotation. Let's use this newfound knowledge.
Recall the CD player from earlier. If a point on the edge of the disk has a velocity of $v = 15 ~\textrm{m/s}$ by the end of the motion, what is the radius of the CD disk?
First, we need to know the angular velocity at the end of the motion. This is easily found, as we have our time that we calculated earlier. It's a simple calculation using the $ \omega = \omega_0 + \alpha t $ relation.
$$ \omega = \alpha t = 16.2~\textrm{rad/s} $$ Now that we have the angular velocity, we can use the relationship between angular and linear quantities to determine what the radius of the CD must be. A point on the edge of the CD is at a distance equal to the radius of the CD from its center.
$$ \omega r = v $$ $$ r = \omega/v = \bbox[3px, border: 0.5px solid white]{1.08~\textrm{m} }$$ That's a pretty large CD disk, and an even more impressive CD player that can accomodate it!
Now, what do we use for the unit of these quantities? If you aren't too familiar with later math courses, you might think to use degrees, but that typically does not work. We use radians for the unit of angular displacement or position, because it fits better into later formulas. The reason for this is mathematical.
See, the arc length of a circle with radius $R$ described by an angle $\theta$ can be written more simply if we define $\theta$ as in radians rather than degrees. I won't launch into a full math explanation here because this is supposed to focus on physics, but it has to do with how radians are defined. Essentially, if we use $s$ to represent arc length, then it can be written simply as:
$$ s = R \theta $$ This is why radians reigns supreme as the unit of choice. With that detour out of the way, we can express the units of angular velocity and angular acceleration just like we do velocity and accleration, except for the part where we replace meters with radians. Angular velocity has a unit of $\textrm{rad/s}$, and angular acceleration has a unit of $\textrm{rad/s}^2$. Nothing too crazy.
Relation to Linear Kinematics
I want you to turn your attention back to one paragraph before, where we estabished that arc length is related to the angular position/displacement and the radius. Well, the other angular quantities can be related to their linear counterparts in the same way.
$$s = R \theta $$ $$ v = \omega R $$ $$ a = \alpha R $$ $R$ represents the distance between the center of rotation and the point of interest. Of course, the point has to actually be on the thing that's rotating, otherwise our calculations are meaningless.
It is very important to note that these equations are not universally applicable! Only when there is rotation can these be used. You don't have angular velocity for an object going at some velocity in a straight line.
You might wonder how these equations can be useful. Well, recall that I said earlier how all points on a rigid body have the same angular velocity. With the angular velocity of the object determined, then, you can find the velocity of any point on the rigid body. The same applies for acceleration. Since things tend to break because of linear acceleration and not necessarily angular acceleration, this technique can be used to calculate how fast something can spin before vital components break. It's a bit of a stretch, but the math does work.
Circular Motion Connection
Circles. When have we talked about circles before? Hmm...
Yes, that's right! We dedicated (half) a unit to circular motion! It's only natural that circular motion has a tie-in to this concept, because rotation is also motion in a circle. We are going to re-express our previous knowledge of circular motion with angular quantities.
Of course, we start with centripetal acceleration. We know the formula in terms of linear quantities is $a_c = v^2/r$, but what about in terms of angular ones? Well, since we have motion in a circle, which is a form of rotation, we can use the equations that relate angular and linear quantities. Specifically, we use the one for velocity.
$$ v = \omega r $$ $$ a_c = (\omega r)^2/r $$ After the algebra clears, we're left with:
$$ a_c = \omega ^2 r $$ Our new expression of centripetal force can tell us many things. But wait! You might be asking yourself where tangential acceleration went. Ah, but we've talked about it before! Remember this equation?
$$ a = \alpha r $$ Well, that's actually tangential acceleration! (We should write $a_t = \alpha r$.) Think about it. Angular acceleration tends to speed up the spinning motion of the object, which increases the speed of any point on it. Centripetal acceleration is present regardless of whether there is angular acceleration. Let's look back at its new form.
We know that $\omega$ is constant for a rigid body in rotation, so the first part of the expression is constant. This tells us that the centripetal acceleration will get stronger with distance from the center of the object, since the expression is directly proportional to $r$. This is pretty intuitive to feel, though I can't think of a good example that represents this in the real world.
There is, however, a theoretical application of this. To show you, let's do a practice problem on it!
A space station can be modelled as a ring that spins about an axis perpendicular to its plane and passing through its center in order to generate artificial gravity. If the radius of the ring is $150 ~\textrm{m}$, what is the required angular velocity $\omega$ for the ring to generate an effective gravity equal to $g$?
Figure 2: The One Ring. There actually exists an idea called the "ringworld" which comprises a very large spinning ring spinning to generate artificial gravity for inhabitants on the inside of such a ringworld. The basic principle of action between this and our space station is the same, and isn't very complex.
The key idea is that the spinning of the ring causes people inside to feel a centrifugal , which is essentially a simulated gravity. The bigger the ring, the slower the required angular velocity. We need the centrifugal acceleration to be equal to $g$, which allows us to set up the following equation:
$$ a_c = \omega ^2 r = g $$ Now, we simply solve for $\omega$. $$ \omega = \sqrt{\dfrac{g}{r} } = \bbox[3px, border: 0.5px solid white] {0.256 ~\textrm{rad/s} } $$
What's the thing we talked about most in our circular motion unit? That's right, it was the idea of the centripetal acceleration! Now that we have angular quantities, we cn re-write it with those instead of linear quantities. Circular motion satisfies the genre of rotational motion since it's something rotating around a circle, so we can use the formula:
$$ v = \omega R$$ Recall our definition for centripetal acceleration ($a_c = \frac{v^2}{r}$). If we use the previous equation to substitute for $v$, we can arrive at a new form of the equation:
$$ a_c = \dfrac{(\omega R)^2}{R} = \omega^2 R $$ A simple mathematical derivation, one of the simplest you'll see. What now? Well, before we break down this formula, let's address the elephant in the room. What acceleration is $a = \alpha R$ then, if this is centripetal?
Well, that describes the tendency for an object to speed up or slow down while it goes in a circle. Recall that centripetal acceleration is unable to change the speed of an object, but rather only changes its direction! This is that counterpart to the centripetal acceleration, that can change the speed, and it's the tangential acceleration.
With that explanation out of the way, let's begin in earnest our exploration of the new formula. We know that $\omega$ is constant for a rigid body, which means that the centripetal acceleration increases linearly with the distance from the center of rotation. This doesn't have any obvious real-life applications, yet I would say this conclusion feels pretty intuitive. There is one futururistic application of this concept, however: the ringworld or ring-station.
Figure 2: The One Ring. The ringworld or spinning space station works by generating artificial gravity through the centrifugal force generated by rotation. People can then live under the simulated gravity within the ring just like they were on Earth. The fact that the centrifugal acceleration is directly proportional to $R$ has the consequence that larger ringworlds (bigger $R$) will not need to have as much angular velocity in order to produce a centrifugal acceleration equal to $g$. Who knew we would glimpse futuristic technology in a kinematics chapter?
Conclusion
This concludes our first lesson on rotation. This was basically just kinematics turned into a rotational form, so nothing groundbreaking was introduced here. However, just like linear kinematics before it, rotational kinematics forms the foundation for later rotational concepts, which rely on it in order to make sense.
We moved on from kinematics to forces before, and we're doing the same here. If you're ready to learn about what force is in a rotational context, move on to the next lesson to learn about the rotational analogue of force: torque.