this is designed for the about link on the homepage to auto expand
Relative Velocity (and reference frames)
Introduction
Relative velocity will be a rather short lesson, as there are mostly just concepts that we need to go over.
In actuality, it is not a huge topic to tackle. The easiest way to teach this is by example. A common example used is a person in a train and an onlooker at a station or the side of the tracks. To someone else in the train with me, it does not look like I am moving. However, to the onlooker on the outside, I am zooming past them. Why is this? Well, the key here is the idea of a reference frame.
Reference Frames
A reference frame is nothing too complex, it is exactly what it sounds like. It is a frame in which you conduct your calculations and view everything happen. The key thing here is though, a reference frame could be inertial or non inertial. Pretty much all of the reference frames we work inside will always be inertial, unless otherwise stated.
Noninertial reference frames don't serve a purpose until much later—so don't worry too much about them for now. We will soon explain why we prefer inertial reference frames! For now, just understand the concept of it, since reference frames will come up again later on!!
Relative Velocity Equation
So for someone in the train, since they are moving at the same velocity I am, they don't see me move relative to their point of view. The same applies to the observer, since he is not moving, while I am, it looks to him as if I am moving.
Let's say I wanted to find what my velocity was relative to the observer. From that we can derive an equation:
$$\vec{v_{PO}}=\vec{v_{PT}}+\vec{v_{TO}}$$ The subscripts and symbols might be a bit confusing at first, but essentially what they mean is that my velocity relative to the observer ($v_{PO}$) is equal to the vector sum of my velocity relative to the train ($v_{PT}$) and the velocity of the train relative to the observer ($v_{TO}$). We notice that this is a vector sum, which means it works in multiple dimensions.
Furthermore, you might see that the middle two subscripts are equal. That means to find the velocity of A relative to B, we can find the relative velocity of A to another point C, and the velocity of C relative to point B. Adding those will actually give us the velocity of A, relative to B! That's how vectors work to help us. Let's work through a minimal example on the next page.
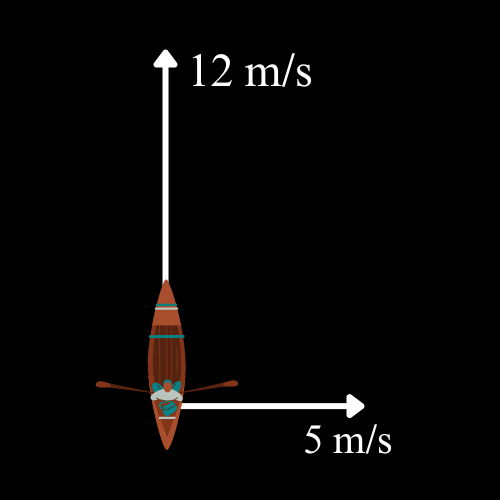
A boat is traveling North at a speed of $12~\textrm m /\textrm s$ across a river with a current flowing East at a speed of $5~\textrm m /\textrm s$. What is the boat's velocity relative to an observer on the Southern shore in component form? Assume North and East are the positive directions.
Perhaps a diagram will help us solve this problem:
Figure 1: A boat traveling across a river, with vectors labeled. Obviously we have the boat and the observer, but we need a third point of reference to go about. There are many options that we can choose, but we want to make our math as simple as possible. When the boat is traveling North, it is also being pushed downstream with the water. Thus from the water's perspective, the boat is not moving at all (Think back to the train example: To you, someone else on the train isn't moving because you are both moving at the same speed the train is)!
Now let's try and relate the water and the observer on the shore. The observer on the shore is not moving, so the water is moving relative to the shore. Thus, when we do a vector sum, splitting the two vectors into components (North-South is the vertical component, East-West is the horizontal component):
$$v_{BO} = v_{BW} + v_{WO}$$ $$\langle v_{BO_x}, v_{BO_y} \rangle = \langle 0,12 \rangle + \langle 5,0 \rangle=\bbox[3px, border: 0.5px solid white]{\langle 5,12 \rangle}$$ The boat's velocity relative to the water only has a vertical component, Northbound at $12~\textrm m /\textrm s$. That's why its horizontal component is zero. Relative to the observer on the shore, the water is moving East with a speed of $5~\textrm m /\textrm s$, and not moving North or South. That's why its vertical component is zero. Since we know how to find the magnitude, we can do this relatively easily using Pythagorean theorem:
$$|v_{BO}|=\sqrt{(5)^2+(12)^2}=\bbox[3px, border: 0.5px solid white]{13~\textrm m /\textrm s}$$
Conclusion
Sometimes, it may be easier to shorthand the equation like so, especially when $C$ is not needed:
$$v_{AB} = v_A-v_B$$ And vice versa. Essentially, what this equation states is that the velocity of A relative to B is the velocity of A minus the velocity of B. However use this only when the velocity of A and B are given to be relative to the same reference frame C.
Congratulations! You finished the first unit in your physics journey. But, don't give up now, because a whole world of physics awaits! You have only scratched the surface of it. Next unit is probably the one of the most important, if not THE most important lesson in all of Newtonian mechanics. Onwards!